エディタ, プログラミング, トラブルシューティング, ステレオカメラ
その他
ここでは, プログラミングに関することが書かれます. 多くのプログラミング言語で共通することが書かれます.
nodecゲームエディタの使い方を説明します。
nodecゲームエディタを使用して、3Dモデルを取り込む方法を説明します。
nodecゲームエンジンを使用して、モデルのテクスチャを変更する方法を説明します。
nodecゲームエディタの使い方を説明します。
あるファイルもしくは, フォルダが指定されたフォルダ以下にあるかどうかの簡単な判定方法について考える.
広く使われているUnicode規格を理解し, エンコーディングの手法, UTF-8, UTF-16, UTF-32, を理解して, 多言語の文字コードを扱えるようになることを目指します. 具体的に, UTF-8, UTF-16, UTF-32間の変換方法をC++で実装し, 手法はできるだけ速い方法を用います.
ArduinoとPython間のシリアル通信で, Arduino側から送られたシリアルデータをPythonのpySerialモジュールで読み込むと, 破損したデータ-予想していないデータ-を受信する. だが, 一度Arduinoのシリアルモニタでデータを確認すると正常に受信できており, それ以降, pythonの方でも正常に受信できる.
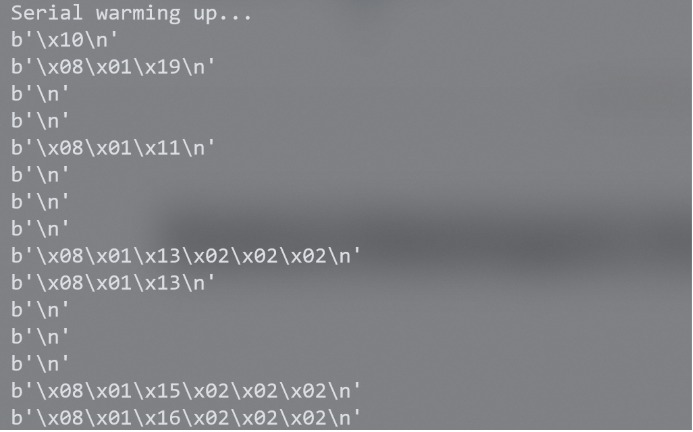
本稿では, 上記の問題の原因と解決方法について述べる.
ArduinoとPython間のシリアル通信で, Arduino側から送られたシリアルデータをPythonのpySerialモジュールで読み込むと, 破損したデータ-予想していないデータ-を受信する. だが, 一度Arduinoのシリアルモニタでデータを確認すると正常に受信できており, それ以降, pythonの方でも正常に受信できる.
本稿では, 上記の問題の原因と解決方法について述べる.
ArduinoとPython間のシリアル通信で, Arduino側から送られたシリアルデータをPythonのpySerialモジュールで読み込むと, 破損したデータ-予想していないデータ-を受信する. だが, 一度Arduinoのシリアルモニタでデータを確認すると正常に受信できており, それ以降, pythonの方でも正常に受信できる.
本稿では, 上記の問題の原因と解決方法について述べる.
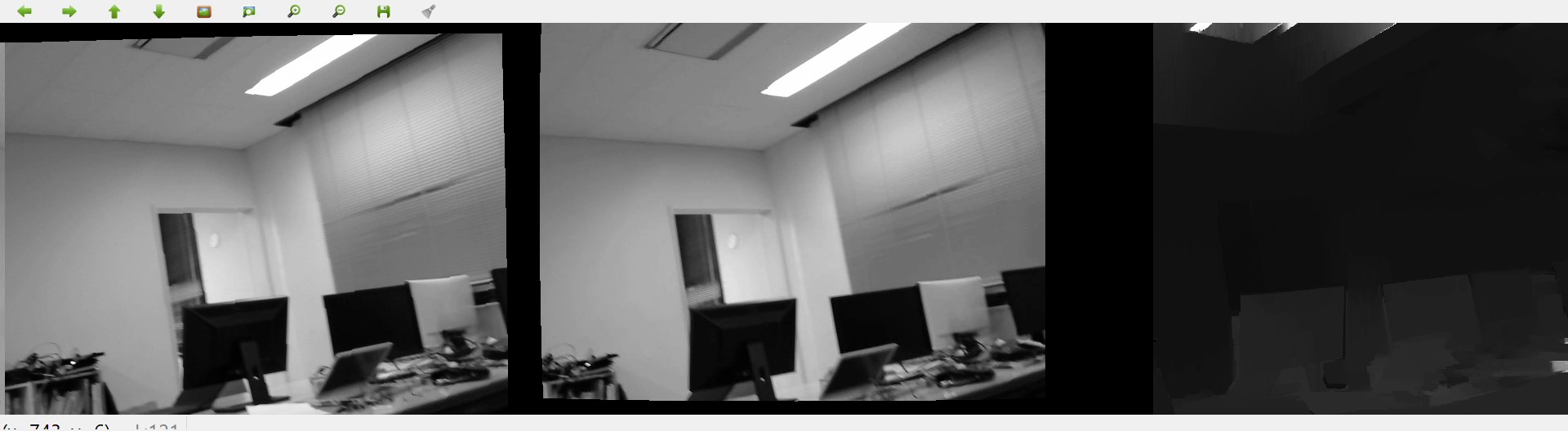
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.