エディタ, 校正, Pipenv, ステレオカメラ
+
その他
チュートリアル, nodec-game-engine, ゲームエンジン
エディタの使い方 | nodec game engine (ゲームエンジン)
nodecゲームエディタの使い方を説明します。
モデルのテクスチャを変更する | エディタの使い方
nodecゲームエンジンを使用して、モデルのテクスチャを変更する方法を説明します。
モデルの取り込み方法 | エディタの使い方
nodecゲームエディタを使用して、3Dモデルを取り込む方法を説明します。
ゲーム, nodec
エディタの使い方 | nodec game engine (ゲームエンジン)
nodecゲームエディタの使い方を説明します。
プロトコル, 文章
文章校正プロトコル | 文章
本稿は, 筆者が今まで文を書いてきて, 先輩, 先生方から言われた文の校正内容をまとめたものです. 文の意味で校正をするのではなく, 文を文字列として扱いプロトコル的に校正します.
Python
Pipenv上でROS2ノードを動かす | Tips
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
OpenCVで二つのWEBカメラを用いたステレオカメラの実装 | 画像処理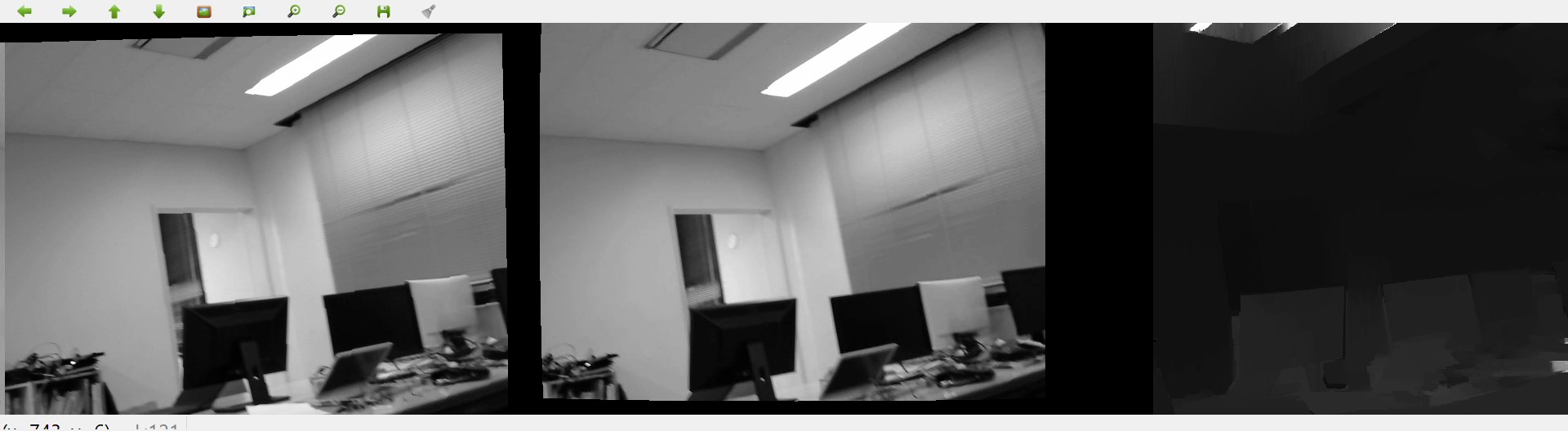
結果画像
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.
ROS, OS, Tips
Pipenv上でROS2ノードを動かす | Tips
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
OpenCV, 画像処理
OpenCVで二つのWEBカメラを用いたステレオカメラの実装 | 画像処理結果画像
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.