言語パック, シリアル通信, 定理, ステレオカメラ
その他
LanguagePackManagerの導入方法を説明します. 説明項目は以下のとおりです.
- ダウンロード
- Unityにインポート
ここでは, LanguagePackManagerの基本的な使い方を説明します. 説明項目は以下のとおりです.
- パラメータの説明
- 言語パックの作成
- 使用例
- 言語パックの読み込みについて
LanguagePackManagerとは言語パックを管理するものです. もちろんですがUnity上で動作します.
これを使うと以下のことができます.
- 言語パックの管理
- 各シーンでのアンロードとロード
言語パックといいながらファイル形式はテキスト形式です. 言語関係の編集が簡単になります.
また言語パックを各シーンでアンロードされるのでロードした言語パックが残り続けることがありません. これはすなわち使っていないメモリを開放します.
LanguagePackManagerを改良、強化、何でもしてください(;´∀`)
このページで書かれている書かれている内容が実際のスクリプトと異なる可能性があります.
このページの内容は2016年に執筆されています.
ArduinoとPython間のシリアル通信で, Arduino側から送られたシリアルデータをPythonのpySerialモジュールで読み込むと, 破損したデータ-予想していないデータ-を受信する. だが, 一度Arduinoのシリアルモニタでデータを確認すると正常に受信できており, それ以降, pythonの方でも正常に受信できる.
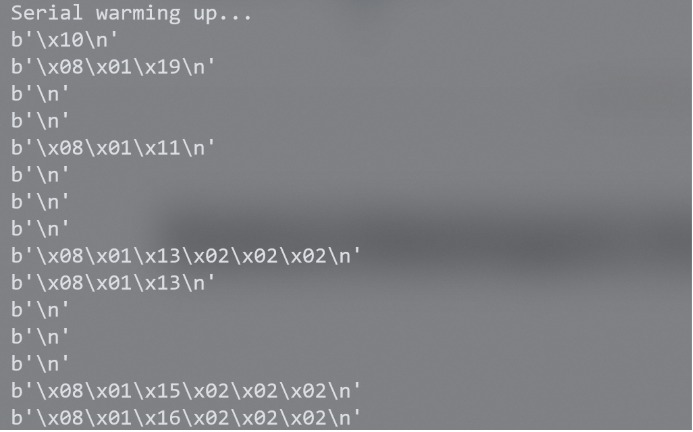
本稿では, 上記の問題の原因と解決方法について述べる.
ArduinoとPython間のシリアル通信で, Arduino側から送られたシリアルデータをPythonのpySerialモジュールで読み込むと, 破損したデータ-予想していないデータ-を受信する. だが, 一度Arduinoのシリアルモニタでデータを確認すると正常に受信できており, それ以降, pythonの方でも正常に受信できる.
本稿では, 上記の問題の原因と解決方法について述べる.
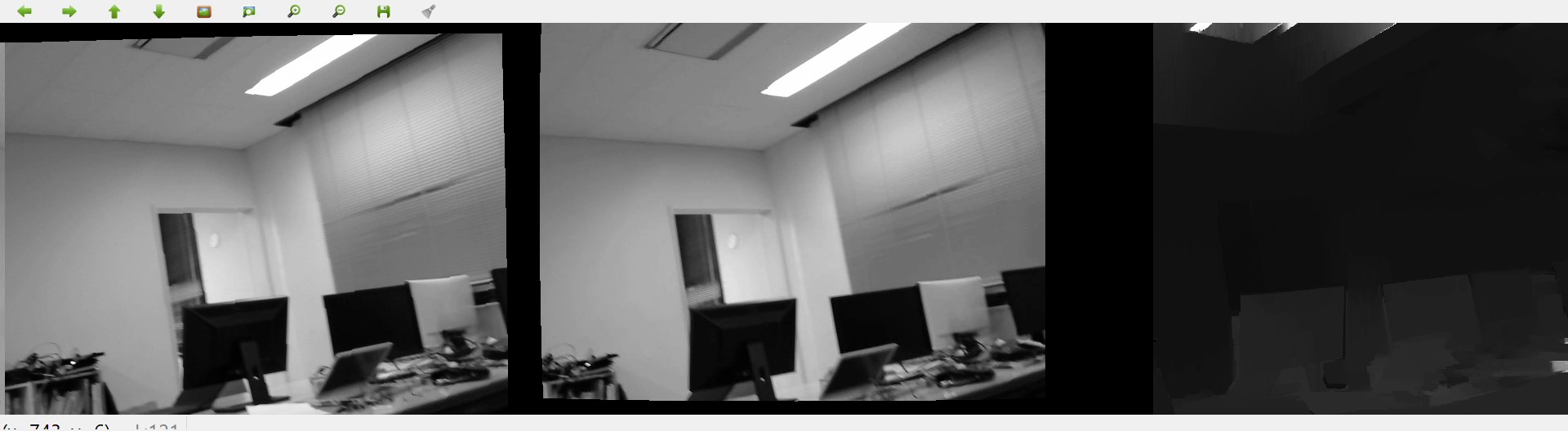
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.
線形代数にある線形写像, 基底の変換行列, 表現行列などを理解するとき, 今どこの座標系にいるのか, 基底は変わったのか, ここはベクトル空間かという悩みに会います.
本稿では, 変換行列や表現行列を図で理解することを目的にします. 行列の掛け算が点の移動であることを意識すると, 理解しやすくなります.
線形代数にある線形写像, 基底の変換行列, 表現行列などを理解するとき, 今どこの座標系にいるのか, 基底は変わったのか, ここはベクトル空間かという悩みに会います.
本稿では, 変換行列や表現行列を図で理解することを目的にします. 行列の掛け算が点の移動であることを意識すると, 理解しやすくなります.
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.