言語パック, デバッガ, 軽量マークアップ言語, Python
その他
LanguagePackManagerの導入方法を説明します. 説明項目は以下のとおりです.
- ダウンロード
- Unityにインポート
ここでは, LanguagePackManagerの基本的な使い方を説明します. 説明項目は以下のとおりです.
- パラメータの説明
- 言語パックの作成
- 使用例
- 言語パックの読み込みについて
ここでは, OutlineTextの特徴を示します.
OutlineTextの特徴は以下のとおりです.
- プレーンテキストでの見た目がそのままウェブページに反映
- 文章のアウトラインを見えやすく
- 見た目が分かりやすい文章は,読みやすく書きやすい
OutlineTextは, プレーンテキストの段階で文章のアウトラインを分かりやすくするために開発された軽量マークアップ言語です. 他の軽量マークアップ言語(Markdown, AsciiDoc, ReStructuredText, …)と異なり, インデントは文章の階層構造を表します. このことで, 文章の階層構造が視覚的にわかりやすくなります.
OutlineTextの実行例をご覧になりたい時はこのウェブページを参照してください. このウェブページはすべてOutlineTextで書かれています. OutlineTextのプレーンテキストは, ウェブページ右下にあるこのページのソースコードを表示をクリックすることで, 確認できます.
すぐに試してみたい方は, 以下のページから
すぐに試す
プログラミング言語pythonに関する知識
LanguagePackManagerとは言語パックを管理するものです. もちろんですがUnity上で動作します.
これを使うと以下のことができます.
- 言語パックの管理
- 各シーンでのアンロードとロード
言語パックといいながらファイル形式はテキスト形式です. 言語関係の編集が簡単になります.
また言語パックを各シーンでアンロードされるのでロードした言語パックが残り続けることがありません. これはすなわち使っていないメモリを開放します.
LanguagePackManagerを改良、強化、何でもしてください(;´∀`)
このページで書かれている書かれている内容が実際のスクリプトと異なる可能性があります.
このページの内容は2016年に執筆されています.
PHPでWebアプリケーションを作るとき, 必ずデバックを行う必要があります. Debugの方法として, "echo"関数などを使用したプログラムの状態を画面に出力するなどがありますが, ファイルとしてそのようなデバック情報が保存されないのが難点です.
このDebugツールは以下の目的で作られました.
- 簡単にDebugできるように
- 外部ファイルとしてデバック情報を保存
作成したpythonの再利用可能なモジュール群
LanguagePackManagerとは言語パックを管理するものです. もちろんですがUnity上で動作します.
これを使うと以下のことができます.
- 言語パックの管理
- 各シーンでのアンロードとロード
言語パックといいながらファイル形式はテキスト形式です. 言語関係の編集が簡単になります.
また言語パックを各シーンでアンロードされるのでロードした言語パックが残り続けることがありません. これはすなわち使っていないメモリを開放します.
LanguagePackManagerを改良、強化、何でもしてください(;´∀`)
このページで書かれている書かれている内容が実際のスクリプトと異なる可能性があります.
このページの内容は2016年に執筆されています.
PHPでWebアプリケーションを作るとき, 必ずデバックを行う必要があります. Debugの方法として, "echo"関数などを使用したプログラムの状態を画面に出力するなどがありますが, ファイルとしてそのようなデバック情報が保存されないのが難点です.
このDebugツールは以下の目的で作られました.
- 簡単にDebugできるように
- 外部ファイルとしてデバック情報を保存
ここでは, OutlineText の文法を示していきます. 基本的に Markdown と似せていますが, インデントに対する挙動が異なります. 見やすい文章を書くことを注意すれば, OutlineText は自然に解釈し構造化します.
オセロです. 遊びで作ったものなので, きれいにできている自信はありません.
より多くの石をひっくり返した方が勝利です.
遊ぶには, pythonの環境が必要です.
AI搭載で一人でも遊べます. (貧弱なAIですので改良しちゃってください.)
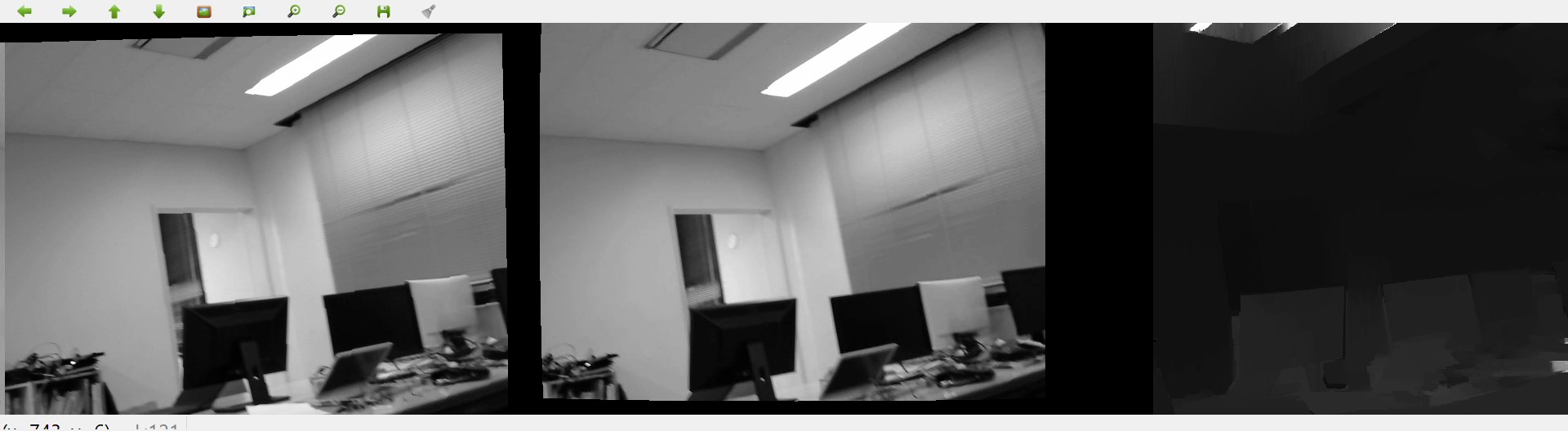
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
ArduinoとPython間のシリアル通信で, Arduino側から送られたシリアルデータをPythonのpySerialモジュールで読み込むと, 破損したデータ-予想していないデータ-を受信する. だが, 一度Arduinoのシリアルモニタでデータを確認すると正常に受信できており, それ以降, pythonの方でも正常に受信できる.
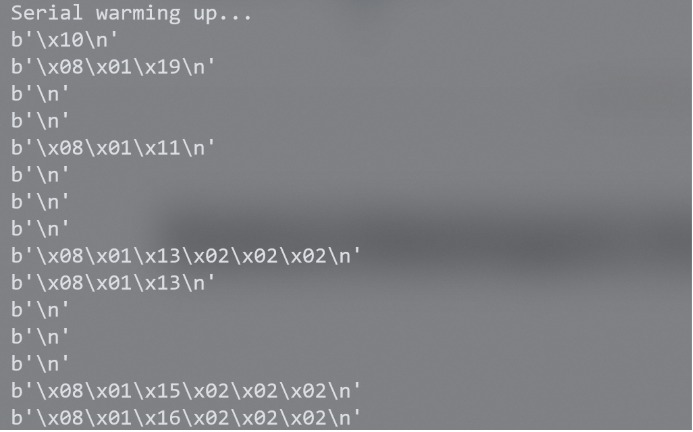
本稿では, 上記の問題の原因と解決方法について述べる.